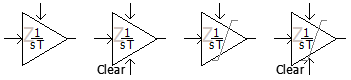
This component models a resettable integrator in the discrete domain with optional non-windup limits. The component is triggered by the 2-element, interpolated Enable/Disable port signal.
The solution method for this function is as follows:

Where,
|
Output signal |
|
Time at last execution |
|
Time at execution, before the last execution |
|
Input signal at last execution |
|
Input signal at execution, before the last execution |
|
Time constant at last execution |
|
Time constant at execution before the last execution |
|
|
k = 1 for forward Euler, k = 0 for Backward Euler and k = 0.5 for Trapezoidal integration rules.
More: |
Derivative with a Time Constant (Z-Domain) |








