This function performs a Proportional – Integral – Differential (PID) controller as follows:

There are three additional functions can be applied to this component:
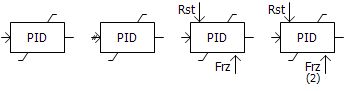
Freeze: The state of the Integrator and Differentiator can be frozen at a specific time by applying a non-zero integer at the Frz input. Interpolation function is included.
Reset: When a non-zero integer is applied to Rst input, the output of the Integrator and Differentiator can be separately reset to a predefined value, and output of proportional function is set to 0.0. Interpolation function is included. This function is visible only if the dimension of the input is 1.
Limit: The output can be limited based on IEEE 421.5.
Interpolation Compatibility:
There is no interpolation for Input.
The Freeze and Reset signals come with interpolation compatibility. If so, the interpolated information is used to determine the exact time of reset or freeze, and hence calculate the exact output value at the next time step following the reset or freeze.
|
Name for Identification |
Text |
Optional text parameter for identification of the component. |
||
|
|
|
|
|
|
|
Dimension |
|
INTEGER |
Literal |
Dimension of the input signal. |
|
|
|
|
|
|
|
Proportional Gain (Kp) |
|
REAL |
Variable |
Proportional gain factor. |
|
|
|
|
|
|
|
Integral Time Constant (Ti) |
|
REAL |
Variable |
Integral time constant [s]. |
|
|
|
|
|
|
|
Derivative Gain (Kd) |
|
REAL |
Variable |
Derivative gain factor. |
|
|
|
|
|
|
|
Derivative time Constant (Td) |
|
REAL |
Variable |
Derivative time constant [s]. |
|
|
|
|
|
|
|
Initial Output of Integrator |
|
REAL |
Constant |
The initial output of the integrator at time t = 0.0 s. |
|
|
|
|
|
|
|
Initial Output of Differentiator |
|
REAL |
Constant |
The initial output of the differentiator at time t = 0.0 s. |
Limit, Reset and Freeze FunctionLimit, Reset and Freeze Function
|
Freeze Integrator and Differentiator |
|
Choice |
|
Select Enable or Disable. |
|
|
|
|
|
|
|
Interpolated Freeze |
|
Choice |
|
Select Yes or No. See Description for more details. This parameter is enabled only if Freeze Integrator | Enable is selected. |
|
|
|
|
|
|
|
Maximum Limit |
|
REAL |
Variable |
Limits the output to this maximum limit. |
|
|
|
|
|
|
|
Minimum Limit |
|
REAL |
Variable |
Limits the output to this minimum limit. |
|
|
|
|
|
|
|
Reset Function |
|
Choice |
|
Select Enable or Disable. This parameter is enabled if Dimension is 1. |
|
|
|
|
|
|
|
Interpolated Reset |
|
Choice |
|
Select Yes or No. See Description for more details. This parameter is enabled only if Reset Function | Enable is selected. |
|
|
|
|
|
|
|
Output Value of Integrator After Reset |
|
REAL |
Variable |
This is the output of the integrator after a Reset pulse is received. This parameter is enabled only if Reset Function | Enable is selected. |
|
|
|
|
|
|
|
Output Value of Differentiator After Reset |
|
REAL |
Variable |
This is the output of the Differentiator after a Reset pulse is received. This parameter is enabled only if Reset Function | Enable is selected. |